
Разработчики китайской компании Dexta Robotics создали «роботизированную» перчатку Dexmo, способную в процессе взаимодействия с виртуальными объектами передавать тактильную информацию человеку, который надел её на руку.
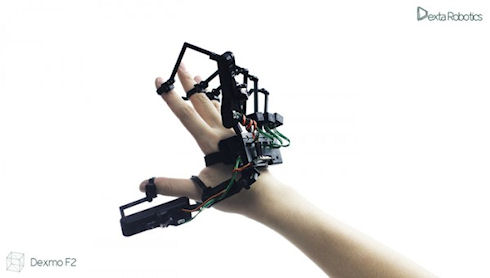
Это происходит благодаря специальному преобразователю IMU (Internal Measurment Unit), установленному в перчатке, который за счёт сочетания акселерометров, магнитометров и гироскопов способен определять скорость, силу гравитации и ориентацию.
Таким образом, перчатка может не только считывать положение руки в пространстве, но и передавать носителю ощущения от прикосновений к предметам, которых не существует в материальном мире.
Как же формируется тактильная отдача?
Это происходит за счёт торможения суставов и электрических импульсов на указательном и большом пальцах, а соприкосновение с объектом фиксируется на программном уровне в реальном времени, после чего обсчитываются параметры работы механической части перчатки.
Благодаря этим возможностям человек сможет «пощупать» виртуальные объекты и окунётся в мир виртуальной или дополненной реальности.
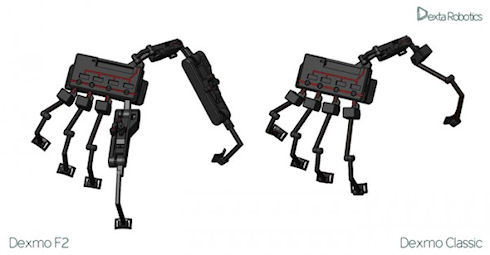
Как известно, финансирование на Кикстартере привлекает многие интересные продукты современности, и Dexmo F2 не стал исключением — комплект для разработчика можно приобрести, инвестировав в проект всего 159 долл.
Кроме того, за 65 долл. можно будет получить Dexmo Classic, лишённого датчиков указательного и большого пальцев.
Согласно официальной информации, владельцы получат первые экземпляры до середины 2015 года.





