
17 октября 2012
ЕКА и НАСА проверили протокол связи, который позволит астронавтам управлять роботами с космических станций, орбитальных комплексов вокруг планет или астероидов. На следующей неделе намечено тестирование с астронавтом МКС.
На прошлой неделе из центра пользователей космической станции при университете г. Боулдер, США послали команду к лэптопу NASA на Международной космической станции, чтобы запустить скрипт, который контролировал Mocup Rover в операционном центре ESOC Европейского Космического Агентства (ЕКА) в Дармштадте, Германия. Марсоходу давались приказы двигаться вперед и делать снимки, которые ровер выполнял, как планировалось.

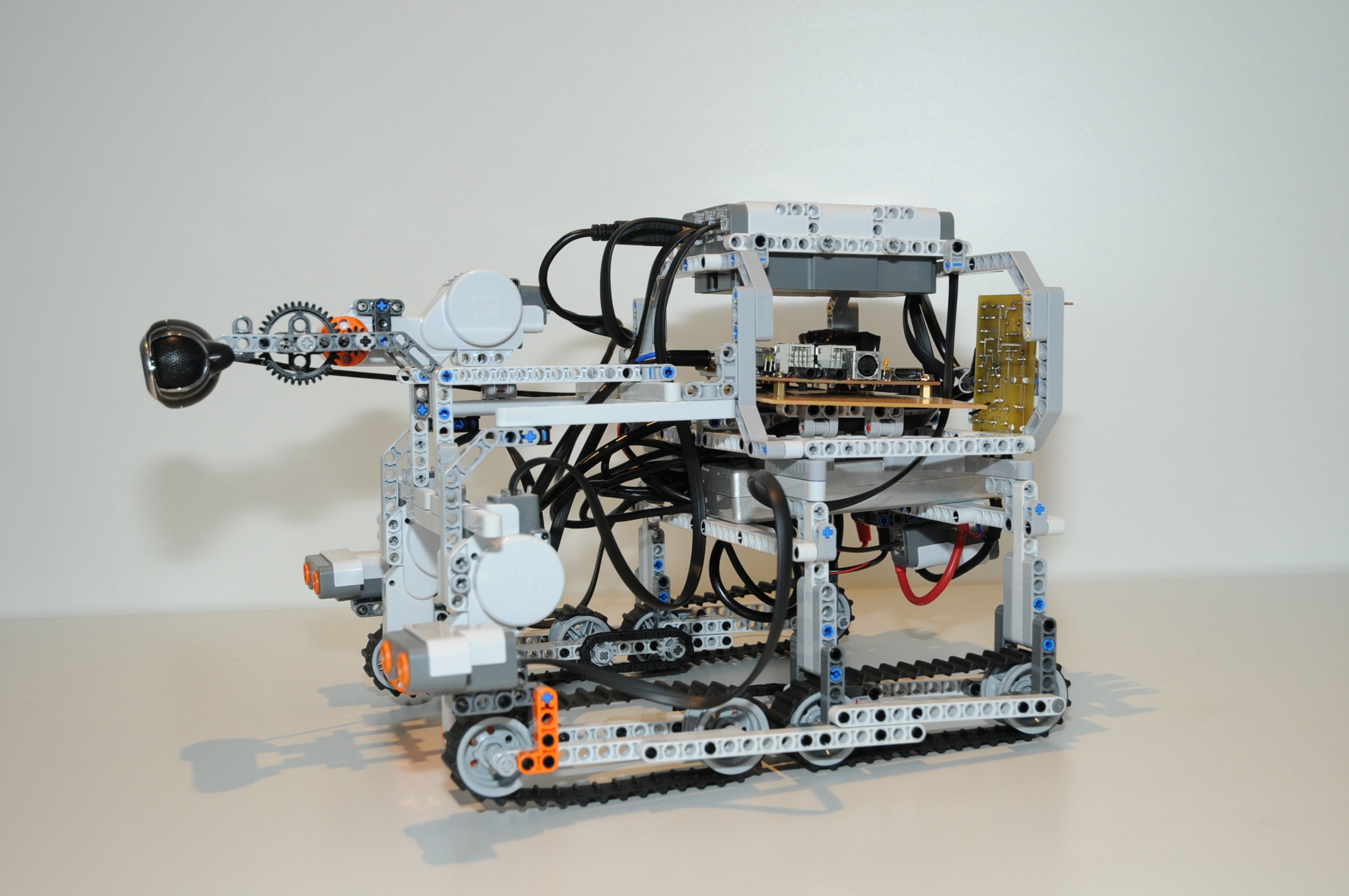
Mocup увеличить изображение 1119Кб. Источник: ESA
Mocup является аббревиатурой от Meteron Operations and Communications Prototype.
Mocup является одним из тестовых роверов в Meteron ЕКА — инициатива для будущих миссий к Луне, Марсу и другим небесным телам.

Большое изображение Mocup 1176Кб
Освоение космоса, скорее всего, пойдет по пути отправки роботов-исследователей для поиска воды на неизведанных планетах до отправки людей на эти земли.
В случае дальних планет, эти роботы смогут управляться астронавтами из космического корабля на орбите планеты.
«В этих тестах мы делаем вид, что Земля это Луна или Марс», говорит Ким Нергаард, операционный менеджер наземного отдела проекта Meteron.
Надежная связь
Отправка команды по этому пути не так проста, как может показаться. Ссылки могут быть прерваны, если нет прямой видимости между Землей или устройством на поверхности.
Должна быть разработана система, которая будет обеспечивать правильную работу даже в менее чем идеальных условиях. Ученые разработали the Disruptive Tolerance Network (помогите точнее перевести название этой сети )как форму «интернет-пространства» для надежной коммуникации.
Сетевой протокол запоминает команды, если сигнал теряется, и пересылает их как только коммуникации восстановили.
Теперь, когда завершат первый тест связи, лэптоп будет передан на МКС в центр управления ЕКА из операционного центра в Бельгии.

(Примечательно, что при первой попытке установки резервного блока застрял один из двух болтов, и астронавты с помощью набора импровизированных инструментов, один из которых был сделан из металлического штыря и зубной щетки, очистили болты и отверстия для них, а затем поставили резервный блок на место — Cholgaa)
На следующей неделе астронавт НАСА Сунита Уильямс будет в первый раз управлять ровером Mocup из космоса в режиме реального времени.
Она будет использовать вход, направлемый к ней непосредственно от самого ровера. ESOC будет только наблюдать за процессом в целях последующего анализа.
«Это первый шаг к проверке системы, необходимой для будущей миссии пилотируемого полета на Марс», говорит Ким. «Как только мы подтвердим, что связь работает, мы начнем тестирование железа и операций».
Автор: Cholgaa






{kind=link}
{kind=link}
{kind=link}