
Обычная бытовая фирменная или самодельная метеостанция измеряет две температуры-влажности (в комнате и на улице), атмосферное давление и дополнительно имеет часы с календарем. Однако, настоящая метеостанция имеет еще много всего — датчик солнечной радиации, измеритель осадков и всякое подобное, что, в общем, требуется только для профессиональных нужд, за одним исключением. Измеритель параметров ветра (скорости, и, главное, направления) — очень полезное дополнение для загородного дома. Причем фирменные датчики ветра довольно дороги даже на Али-Бабе, и имеет смысл присмотреться к самодельным решениям.
Сразу скажу, что если бы я заранее знал, в какой объем ручной работы и потраченных на эксперименты денег выльется моя задумка, может быть и не стал бы начинать. Но любопытство перевесило, а читатели этой статьи имеют шанс избежать тех подводных камней, о которые мне приходилось спотыкаться.
Для измерения скорости ветра (анемометрии) существует стопицот способов, главные из которых такие:
— термоанемометрический,
— механический — с пропеллером (точнее, импеллером ru.wikipedia.org/wiki/Импеллер) или чашечной горизонтальной крыльчаткой (классический чашечный анемометр ru.wikipedia.org/wiki/Анемометр#/media/File:Anemometer.jpg), Измерение скорости в этих случаях эквивалентно измерению частоты вращения оси, на которой закреплена пропеллер или крыльчатка.
— а также ультразвуковой, объединяющий измерения скорости и направления.
Для измерения направления способов меньше:
— упомянутый ультразвуковой;
— механический флюгер с электронным съемом угла поворота. Для измерения угла поворота есть также много различных способов: оптические, резистивные, магнитные, индуктивные, механические. Можно, кстати, просто закрепить на валу флюгера электронный компас — вот только надежные и простые (для «наколеночного» повторения) способы передачи показаний с хаотично вращающейся оси придется еще поискать. Потому мы далее выбираем традиционный оптический способ.
При самостоятельном повторении любого из этих способов следует держать в уме требования минимального энергопотребления и круглосуточного (а, может, и круглогодичного?) пребывания на солнце и под дождем. Датчик ветра нельзя разместить под крышей в тени — наоборот, он должен быть максимально удален от всех мешающих факторов и «открыт всем ветрам». Идеальное место размещения — конек крыши дома или, на худой конец, сарая или беседки, удаленных от других строений и деревьев. Такие требования предполагают автономное питание и, очевидно, беспроводной канал передачи данных. Этими требованиями обусловлены некоторые «навороты» конструкции, которая описывается далее.
Познавательную историю о том, как я пытался воспроизвести самый современный и продвинутый из способов — ультразвуковой, и потерпел неудачу, я расскажу как-нибудь в другой раз. Все другие способы предполагают раздельное измерение скорости и направления, потому пришлось городить два датчика. Поизучав теоретически термоанемометры, я понял, что готовый чувствительный элемент любительского уровня у нас приобрести не получится (на западном рынке они доступны!), а самостоятельно изобретать — ввязываться в очередные НИиОКР с соответствующими тратами времени и денег. Потому по некотором размышлении я решил сделать унифицированную конструкцию на оба датчика: чашечный анемометр с оптическим измерением скорости вращения и флюгер с электронным съемом угла поворота на основе кодирующего диска (энкодера).
Конструкции датчиков
Преимущество механических датчиков в том, что никакие НИиОКР там не требуются, принцип прост и понятен, а качество результата зависит только от аккуратности исполнения тщательно продуманной конструкции.
Так казалось теоретически, на практике это вылилось в кучу механических работ, часть из которых пришлось заказывать на стороне, ввиду отсутствия под рукой токарного и фрезерного станков. Сразу скажу, что я ни разу не пожалел о том, что с самого начала сделал ставку на капитальный подход, а не стал городить конструкции из подручных материалов.
Для флюгера и анемометра нужны следующие детали, которые пришлось заказать у токаря и фрезеровщика (количество и материал указаны сразу для обоих датчиков):

Оси, заметим, обязательно вытачиваются на токарном станке: изготовить на коленке ось с острием точно по центру практически невозможно. А размещение острия точно по оси вращения здесь — определяющий фактор успеха. Кроме того, ось должна быть идеально прямой, никакие отклонения не допускаются.
Механический датчик направления ветра — электронный флюгер
Основой флюгера (как и датчика скорости далее) служит П-образная скоба из дюраля Д-16, изображенная на чертеже вверху слева. В нижнее углубление запрессовывается кусочек фторопласта, в котором делается ступенчатое углубление последовательно сверлами 2 и 3 мм. В это углубление острым концом вставляется ось (для флюгера — из латуни). Сверху она свободно проходит через отверстие 8 мм. Над этим отверстием винтами М2 к скобе прикрепляется прямоугольный кусочек того же фторопласта толщиной 4 мм так, чтобы он перекрывал отверстие. Во фторопласте сделано отверстие точно по диаметру оси 6 мм (расположенное точно по общей оси отверстий — см. сборочный чертеж ниже). Фторопласт вверху и внизу здесь играет роль подшипников скольжения.

Ось в месте трения о фоторопласт можно отполировать, а площадь трения уменьшить, отзенковав отверстие во фторопласте. Для флюгера это не играет особой роли — некоторая «заторможенность» ему даже полезна, а для анемометра придется постараться минимизировать трение и инерцию.
Теперь о съеме величины угла поворота. Классический энкодер Грея на 16 положений применительно к нашему случаю выглядит так, как показано на рисунке:

Размер диска был выбран, исходя из условия надежной оптической изоляции пар излучатель-приемник друг от друга. При такой конфигурации щели шириной 5 мм располагаются с промежутком также 5 мм, а оптические пары расположены на расстоянии ровно 10 мм. Размеры скобы, к которой крепится флюгер, были рассчитаны именно исходя из диаметра диска 120 мм. Все это, конечно, можно уменьшить (особенно, если подобрать светодиоды и фотоприемники как можно меньшего диаметра), но было принята во внимание сложность изготовления энкодера: выяснилось, что фрезеровщики за такую тонкую работу не берутся, потому его пришлось выпиливать вручную надфилем. А тут чем больше размеры, тем надежнее результат и меньше хлопот.
На сборочном чертеже выше показано крепление диска к оси. Тщательно отцентрованный диск крепится винтиками М2 к капролоновой втулке. Втулка размещается на оси так, чтобы зазор вверху был минимальным (1-2 мм) — так, чтобы ось в нормальном положении вращалась свободно, а при перевороте острие не выпадало из гнезда внизу. Блоки фотоприемников и излучателей прикрепляются к скобе сверху и снизу диска, более конкретно об их конструкции далее.
Вся конструкция помещается в пластиковый (АБС или поликарбонат) корпус 150×150×90 мм. В собранном виде (без крышки и флюгера) датчик направления выглядит следующим образом:

Отметьте, что выбранное направление на север помечено стрелкой, его нужно будет соблюдать при установке датчика на место.
На верхушку оси крепится собственно флюгер. Он изготовлен на основе такой же латунной оси, в разрез на тупой стороне которой впаивается хвостовик из листовой латуни. На остром конце на некоторую длину нарезается резьба М6, и на ней с помощью гаек закрепляется круглый груз-противовес, отлитый из свинца:

Груз рассчитан так, чтобы центр тяжести приходился точно на место крепления (передвигая его вдоль резьбы, можно добиться идеальной балансировки). Крепление флюгера к оси осуществляется с помощью нержавеющего винта М3, который проходит через отверстие в оси флюгера и ввинчивается в резьбу, нарезанную в оси вращения (крепящий винт виден на фото выше). Для точной ориентации верхушка оси вращения имеет полукруглое углубление, в которое ложится ось флюгера.
Датчик скорости ветра — чашечный анемометр своими руками
Как вы уже поняли, основа для датчика скорости в целях унификации была выбрана та же самая, что и для флюгера. Но требования к конструкции тут несколько иные: в целях снижения порога трогания анемометр должен быть максимально облегчен. Поэтому, в частности, ось для него сделана из дюраля, диск с отверстиями (для измерения частоты вращения) уменьшен в диаметре:

Если для четырехбитного энкодера Грея требуется четыре оптопары, то для датчика скорости всего одна. По окружности диска на равном расстоянии просверлено 16 отверстий, таким образом один оборот диска в секунду эквивалентен 16 герцам частоты, поступающей с оптопары (можно больше отверстий, можно меньше — вопрос только в масштабе пересчета и экономии энергии на излучатели).
Самодельный датчик все равно получится достаточно грубым (порог трогания не менее полуметра-метра в секунду), но его снизить можно только если радикально изменить конструкцию: например, вместо чашечной вертушки поставить пропеллер. У чашечной вертушки разность сил сопротивления потоку, обуславливающая крутящий момент, относительно невелика — она достигается исключительно за счет разной формы поверхности, встречающей набегающий поток воздуха (поэтому форма чашек должна быть как можно более обтекаемой — в идеале это половинка яйца или шара). У пропеллера вращающий момент гораздо больше, его можно сделать гораздо меньшим по весу, и, наконец, само изготовление проще. Но пропеллер нужно устанавливать по направлению потока воздуха — например, разместив его на конце того же флюгера. Вопрос вопросов при этом: как передавать показания с датчика, хаотично вращающегося вокруг вертикальной оси? Я его решить не смог, и судя по тому, что профессиональные чашечные конструкции до сих пор широко распространены, решается он отнюдь не с полпинка (ручные анемометры в расчет не берем — их ориентируют по потоку воздуха вручную).
Мой вариант чашечного анемометра сделан на основе лазерного диска. Вид сверху и снизу показан на фото:


Чашки сделаны из донышек от бутылочек из-под детской воды «Агуша». Донышко аккуратно отрезается, причем все три — на одинаковом расстоянии, чтобы имели равный вес, локально прогревается по центру (ни в коем случае не грейте целиком — необратимо покоробится!) и тыльной стороной деревянной ручки от напильника выгибается наружу, чтобы сделать его более обтекаемым. Будете повторять — запаситесь бутылочками побольше количеством, из пяти-шести штук вам, вероятно, удастся сделать три более-менее одинаковых чашки. В изготовленных чашках делается сбоку прорезь и они закрепляются по периметру диска под 120° по отношению друг к другу с помощью водостойкого клея-герметика. Диск строго центруется относительно оси (я это делал с помощью вложенной металлической шайбы) и закрепляется на капролоновой втулке винтами М2.
Общая конструкция и установка датчиков
Оба датчика, как уже говорилось, размещаются в пластиковых корпусах 150×150×90 мм. К выбору материала корпуса надо подходить продуманно: АБС или поликарбонат имеют достаточную атмосферостойкость, но полистирол, оргстекло и тем более полиэтилен тут решительно не подойдут (и окрасить для защиты от солнца их тоже будет затруднительно). Если нет возможности приобрести фирменную коробку, лучше самостоятельно спаять корпус из фольгированного стеклотекстолита, и затем окрасить для защиты от коррозии и придания эстетического вида.
В крышке точно в месте выхода оси делается отверстие 8-10 мм, в которое тем же клеем-герметиком вклеивается пластиковый конус, вырезанный из носика от баллончика со строительным герметиком или клеем:

Чтобы отцентровать конус по оси, струбциной закрепите снизу крышки деревяшку, наметьте на ней точный центр и немного углубитесь перовым сверлом 12 мм, сделав вокруг отверстия кольцевое углубление. Конус туда должен войти точно, после чего его можно обмазывать клеем. Можно его дополнительно зафиксировать в вертикальном положении на время застывания винтом М6 с гайкой.
Датчик скорости сам накрывает ось с этим конусом, как зонтиком, предотвращая попадание воды внутрь корпуса. Для флюгера стоит дополнительно разместить над конусом втулку, которая закроет зазор между осью и конусом от прямого стока воды (см. фото общего вида датчиков далее).
Провода от оптопар у меня выведены на отдельный разъем типа D-SUB (см. фото датчика направления выше). Ответная часть с кабелем вставляется через прямоугольное отверстие в основании корпуса. Отверстие затем прикрывается крышкой с прорезью для кабеля, которая удерживает разъем от выпадания. К основанию корпуса привинчиваются дюралевые скобы для крепления на месте. Конфигурация их зависит от места установки датчиков.
В собранном виде оба датчика выглядят следующим образом:

Здесь они показаны уже установленными на место — на конек беседки. Обратите внимание, что углубления для крепящих крышку винтов защищены от воды заглушками из сырой резины. Датчики устанавливаются строго горизонтально по уровню, для чего пришлось использовать подкладки из кусочков линолеума.
Электронная часть
Метеостанция в целом состоит из двух модулей: выносного блока (который обслуживает оба датчика ветра, а также снимает показания с внешнего датчика температуры-влажности), и основного модуля с дисплеями. Выносной блок оборудован беспроводным передатчиком для отправки данных, установленным внутри него (антенна торчит сбоку). Основной модуль принимает данные от выносного блока (приемник для удобства его ориентации вынесен на кабеле в отдельный блок), а также снимает показания с внутреннего датчика температуры-влажности и выводит все это на дисплеи. Отдельная составляющая основного блока — часы с календарем, которые для удобства общей настройки станции обслуживаются отдельным контроллером Arduino Mini, и имеют свои дисплеи.
Выносной модуль и измерительная схема датчиков ветра
В качестве фотоизлучателей были выбраны светодиоды ИК-диапазона АЛ-107Б. Эти старинные светодиоды, конечно, не самые лучшие в своем классе, зато имеют миниатюрный корпус диаметром 2,4 мм и способны пропускать ток до 600 мА в импульсе. Между прочим, при испытаниях выяснилось, что образец этого светодиода около 1980 года выпуска (в корпусе красного цвета) имеет примерно вдвое большую эффективность (выразившуюся в дальности уверенной работы фотоприемника), чем современные экземпляры, купленные в «Чипе-Дипе» (они имеют прозрачный желтовато-зеленый корпус). Вряд ли в 1980 году кристаллы были лучше, чем сейчас, хотя чем черт не шутит? Возможно, однако, дело в разных углах рассеяния в том и другом оформлении.
Через светодиод в датчике скорости пропускался постоянный ток около 20 мА (резистор 150 Ом при питании 5 вольт), а в датчике направления — импульсный (меандр со скважностью 2) ток около 65 мА (те же 150 Ом при питании 12 вольт). Средний ток через один светодиод датчика направления при этом около 33 мА, всего через четыре канала — около 130 мА.
В качестве фотоприемников были выбраны фототранзисторы L-32P3C в корпусе диаметром 3 мм. Сигнал снимался с коллектора, нагруженного на резистор 1,5 или 2 кОм от питания 5 В. Эти параметры подобраны так, чтобы на расстоянии ~20 мм между фотоизлучателем и приемником на вход контроллера поступал сразу полноразмерный логический сигнал в 5-вольтовых уровнях без дополнительного усиления. Токи, фигурирующие здесь, могут показаться вам несоразмерно большими, если исходить из озвученного выше требования минимального энергопотребления, но как вы увидите, фигурируют они в каждом цикле измерения на протяжении максимум нескольких миллисекунд так, что общее потребление остается небольшим.
Основой для крепления приемников и излучателей послужили отрезки кабельного канала (видны на фото датчиков выше), вырезанные так, чтобы у основания образовать «ушки» для крепления на скобе. Для каждого из этих обрезков к запирающей крышке изнутри приклеивалась пластиковая пластинка, по ширине равная ширине канала. Светодиоды и фототранзисторы закреплялись на нужном расстоянии в отверстиях, просверленных в этой пластинке так, чтобы выводы оказались внутри канала, а наружу выступали только выпуклости на торце корпусов. Выводы распаиваются в соответствии со схемой (см. ниже), внешние выводы делаются обрезками гибкого разноцветного провода. Резисторы для излучателей датчика направления также размещаются внутри канала, от них делается один общий вывод. После распайки крышка защелкивается на место, все щели герметизируются пластилином и дополнительно липкой лентой, которой также закрывается отверстие со стороны, противоположной выводам, и вся конструкция заливается эпоксидной смолой. Внешние выводы, как можно видеть на фото датчиков, выводятся на клеммную колодку, закрепленную на тыльной стороне скобы.
Принципиальная схема блока обработки датчиков ветра выглядит так:

О том, откуда берется питание 12-14 вольт, см. далее. Кроме компонентов, указанных на схеме, выносной блок содержит датчик температуры-влажности, который на схеме не показан. Делитель напряжения, подключенный к выводу A0 контроллера, предназначен для контроля напряжения источника питания с целью своевременной замены. Светодиод, подключенный к традиционному выводу 13 (вывод 19 корпуса DIP) — суперяркий, для его нормального, не слепящего свечения достаточно тока в доли миллиампера, что и обеспечивается необычно высоким номиналом резистора 33 кОм.
В схеме используется «голый» контроллер Atmega328 в DIP-корпусе, запрограммированный через Uno и установленный на панельку. Такие контроллеры с уже записанным Arduino-загрузчиком, продаются, например, в «Чипе-Дипе» (или загрузчик можно записать самостоятельно). Такой контроллер удобно программировать в привычной среде, но, лишенный компонентов на плате, он во-первых, получается экономичнее, во-вторых, занимает меньше места. Полноценный энергосберегающий режим можно было бы получить, избавившись и от загрузчика тоже (и вообще расписав весь код на ассемблере :-)), но здесь это не очень актуально, а программирование при этом неоправданно усложняется.
На схеме серыми прямоугольниками обведены компоненты, относящиеся отдельно к каналам скорости и направления. Рассмотрим функционирование схемы в целом.
Работа контроллера в целом управляется сторожевым таймером WDT, включенным в режиме вызова прерывания. WDT выводит контроллер из режима сна через заданные промежутки времени. В случае, если в вызванном прерывании таймер взводится заново, перезагрузки с нуля не происходит, все глобальные переменные остаются при своих значениях. Это позволяет накапливать данные от пробуждения к пробуждению и в какой-то момент обрабатывать их — например, усреднять.
В начале программы сделаны следующие объявления библиотек и глобальных переменных (чтобы не загромождать текст и без того обширных примеров, здесь выпущено все, что относится к датчику температуры-влажности):
#include <VirtualWire.h>
#include <avr/wdt.h>
#include <avr/sleep.h>
. . . . .
#define ledPin 13 //вывод светодиода (PB5 вывод 19 ATmega)
#define IR_Pin 10 //управление транзистором IRLU (PB2 вывод 16 Atmega)
#define in_3p 9 //вход приемника разряд 3
#define in_2p 8 //вход приемника разряд 2
#define in_1p 7 //вход приемника разряд 1
#define in_0p 6 //вход приемника разряд 0
#define IR_PINF 5 //(PD5,11) вывод для ИК-светодиода частоты
#define IN_PINF 4 //(PD4,6) вход обнаружения частоты
volatile unsigned long ttime = 0; //Период срабатывания датчика
float ff[4]; //значения частоты датчика скорости для осреднения
char msg[25]; //посылаемый месседж
byte count=0;//счетчик
int batt[4]; //для осреднения батарейки
byte wDir[4]; //массив направлений ветра
byte wind_Gray=0; //байт кода направления ветра
Для инициации режима сна и WDT (пробуждение каждые 4 с) служат следующие процедуры:
// перевод системы в режим сна
void system_sleep() {
ADCSRA &= ~(1 << ADEN); //экв. cbi(ADCSRA,ADEN); выключим АЦП
set_sleep_mode(SLEEP_MODE_PWR_DOWN); // режим сна
sleep_mode(); // система засыпает
sleep_disable(); // система продолжает работу после переполнения watchdog
ADCSRA |= (1 << ADEN); /экв. sbi(ADCSRA,ADEN); включаем АЦП
}
//****************************************************************
// ii: 0=16ms, 1=32ms,2=64ms,3=128ms,4=250ms,5=500ms
// 6=1 sec,7=2 sec, 8=4 sec, 9= 8sec
void setup_watchdog(int ii) {
byte bb;
if (ii > 9 ) ii=9;
bb=ii & 7;
if (ii > 7) bb|= (1<<5); //в bb - код периода
bb|= (1<<WDCE);
MCUSR &= ~(1<<WDRF);
// запуск таймера
WDTCSR |= (1<<WDCE) | (1<<WDE);
// установка периода срабатывания сторожевого таймера
WDTCSR = bb;
WDTCSR |= (1<<WDIE); //прерывание WDT
}
//****************************************************************
// Обработка прерывания сторожевого таймера
ISR(WDT_vect) {
wdt_reset();
}
Датчик скорости выдает частоту прерывания оптического канала, порядок величин — единицы-десятки герц. Мерить такую величину экономичнее и быстрее через период (этому была посвящена публикация автора «Оценка методов измерения низких частот на Arduino»). Здесь выбран метод через модифицированную функцию pulseInLong(), который не привязывает измерение к определенным выводам контроллера (текст функции periodInLong() можно найти в указанной публикации).
В функции setup() объявляются направления выводов, инициализируются библиотека передатчика 433 МГц и сторожевой таймер (строка для IN_PINF в принципе лишняя, и вставлена для памяти):
void setup() {
pinMode(IR_PINF, OUTPUT); //на выход
pinMode(IN_PINF, INPUT); //вывод обнаружения частоты на вход
pinMode(13, OUTPUT); //светодиод
vw_setup(1200); // скорость соединения VirtualWire
vw_set_tx_pin(2); //D2, PD2(4) вывод передачи VirtualWire
// Serial.begin(9600); // Serial-порт для контроля при отладке
setup_watchdog(8); //WDT период 4 c
wdt_reset();
}
Наконец, в основном цикле программы мы сначала каждый раз при пробуждении (каждые 4 секунды) считываем напряжение и рассчитываем частоту датчика скорости ветра:
void loop() {
wdt_reset(); //обнуляем таймер
digitalWrite(ledPin, HIGH); //включаем светодиод для контроля
batt[count]=analogRead(0); //читаем и сохраняем текущий код батарейки
/*=== частота ==== */
digitalWrite(IR_PINF, HIGH); //включаем ИК-светодиод датчика скорости
float f=0; //переменная для частоты
ttime=periodInLong(IN_PINF, LOW, 250000); //ожидание 0,25 сек
// Serial.println(ttime); //для контроля при отладке
if (ttime!=0) {//на случай отсутствия частоты
f = 1000000/float(ttime);} // вычисляем частоту сигнала в Гц
digitalWrite(IR_PINF, LOW); //выключаем ИК-светодиод
ff[count]=f; //сохраняем вычисленное значение в массиве
. . . . .
Время горения ИК-светодиода (потребляющего, напомню, 20 мА) здесь, как видите, будет максимальным при отсутствии вращения диска датчика и составляет при этом условии около 0,25 секунды. Минимальная измеряемая частота, таким образом, составит 4 Гц (четверть оборота диска в секунду при 16 отверстиях). Как выяснилось при калибровке датчика (см. далее), это соответствует примерно 0,2 м/с скорости ветра Подчеркнем, что это минимальная измеряемая величина скорости ветра, но не разрешающая способность и не порог трогания (который окажется гораздо выше). При наличии частоты (то есть при вращении датчика) время измерения (и, соответственно, время горения LED, то есть потребление тока) будет пропорционально уменьшаться, а разрешающая способность — увеличиваться.
Далее следуют процедуры, которые выполняются каждое четвертое пробуждение (то есть каждые 16 секунд). Значение частоты датчика скорости из накопленных четырех значений мы передаем не среднее, а максимальное — как показал опыт, это более информативная величина. Каждую из величин, независимо от ее типа, для удобства и единообразия мы перед передачей превращаем в целое положительное число размером в 4 десятичных разряда. За отсчетом числа пробуждений следит переменная count:
//каждые 16 сек усредняем батарейку и определяем максимальное значение
//частоты из 4-х значений:
if (count==3){
f=0; //значение частоты
for (byte i=0; i<4; i++) if (f<ff[i]) f=ff[i]; //максимальное значение из четырех
int fi=(int(f*10)+1000); //доводим до 4 дес. разрядов для отправки
int volt=0; //код батарейки
for (byte i=0; i<4; i++) volt=volt+batt[i];
volt=volt/4+100; //средний код на 100 больше = 3 дес.разряда
volt=volt*10; //до 4 дес. разрядов
. . . . .
Далее — определение кода Грея направления. Здесь для снижения потребления вместо постоянно включенных ИК-светодиодов на все четыре канала одновременно через ключевой полевой транзистор с помощью функции tone() подается частота 5 кГц. Обнаружение наличия частоты на каждом из разрядов (выводы in_0p – in_3p) производится методом, аналогичным антидребезгу при считывании показаний нажатой кнопки. Сначала в цикле дожидаемся, имеется ли на выводе высокий уровень, и затем проверяем его через 100 мкс. 100 мкс есть полпериода частоты 5 кГц, то есть при наличии частоты минимум со второго раза мы опять попадем на высокий уровень (на всякий случай повторяем четыре раза) и это означает, что он точно там есть. Эту процедуру повторяем для каждого из четырех бит кода:
/* ===== Wind Gray ==== */
//направление:
tone(IR_Pin,5000);//частоту 5 кГц на транзистор
boolean yes = false;
byte i=0;
while(!yes){ //разряд 3
i++;
boolean state1 = (digitalRead(in_3p)&HIGH);
delayMicroseconds(100); // задержка в 100 микросекунд
yes=(state1 & !digitalRead(in_3p));
if (i>4) break; //пробуем четыре раза
}
if (yes) wDir[3]=1; else wDir[3]=0;
yes = false;
i=0;
while(!yes){ //разряд 2
i++;
boolean state1 = (digitalRead(in_2p)&HIGH);
delayMicroseconds(100); // задержка в 100 микросекунд
yes=(state1 & !digitalRead(in_2p));
if (i>4) break; //пробуем четыре раза
}
if (yes) wDir[2]=1; else wDir[2]=0;
yes = false;
i=0;
while(!yes){ //разряд 1
i++;
boolean state1 = (digitalRead(in_1p)&HIGH);
delayMicroseconds(100); // задержка в 100 микросекунд
yes=(state1 & !digitalRead(in_1p));
if (i>4) break; //пробуем четыре раза
}
if (yes) wDir[1]=1; else wDir[1]=0;
yes = false;
i=0;
while(!yes){ //разряд 0
i++;
boolean state1 = (digitalRead(in_0p)&HIGH);
delayMicroseconds(100); // задержка в 100 микросекунд
yes=(state1 & !digitalRead(in_0p));
if (i>4) break; //пробуем четыре раза
}
if (yes) wDir[0]=1; else wDir[0]=0;
noTone(IR_Pin); //выключаем частоту
//собираем в байт в коде Грея:
wind_Gray=wDir[0]+wDir[1]*2+wDir[2]*4+wDir[3]*8; //прямой перевод в дв. код
int wind_G=wind_Gray*10+1000; //дополняем до 4-х дес. разрядов
. . . . .
Максимальная длительность одной процедуры будет при отсутствии частоты на приемнике и равна 4×100 = 400 микросекунд. Максимальное время горения 4-х светодиодов направления будет тогда, когда не засвечен ни один приемник, то есть 4×400 = 1,6 миллисекунды. Алгоритм, кстати, точно так же будет работать, если вместо частоты, период которой кратен 100 мкс, просто подать постоянный высокий уровень на светодиоды. При наличии меандра вместо постоянного уровня мы просто экономим питание вдвое. Мы можем еще сэкономить, если завести каждый ИК-светодиод через отдельную линию (соответственно, через отдельный вывод контроллера со своим ключевым транзистором), но зато при этом усложняется схема, разводка и управление, а ток в 130 мА в течение 2 мс каждые 16 секунд — это, согласитесь, немного.
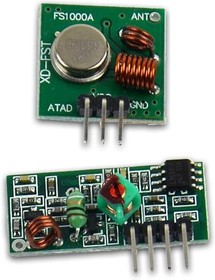
Наконец, беспроводная передача данных. Для передачи данных от места установки датчиков до табло метеостанции был выбран самый простой, дешевый и надежный способ: пара передатчик/приемник на частоте 433 МГц. Согласен, способ не самый удобный (из-за того, что девайсы рассчитаны на передачу битовых последовательностей, а не целых байтов, приходится изощряться в конвертации данных между нужными форматами), и уверен, что многие со мной захотят поспорить в плане его надежности. Ответ на последнее возражение простой: «ты просто не умеешь их готовить!».
Секрет в том, что обычно остается за кадром различных описаний обмена данными по каналу 433 МГц: поскольку приборы эти чисто аналоговые, то питание приемника должно быть очень хорошо очищено от любых посторонних пульсаций. Ни в коем случае не следует питать приемник от внутреннего 5-вольтового стабилизатора Arduino! Установка для приемника отдельного маломощного стабилизатора (LM2931, LM2950 или аналогичного) непосредственно поблизости от его выводов, с правильными цепями фильтрации на входе и выходе, радикально повышает дальность и надежность передачи.
В данном случае передатчик работал непосредственно от напряжения аккумулятора 12 В, приемник и передатчик были снабжены стандартными самодельными антеннами в виде отрезка провода длиной 17 см. (Напомню, что провод для антенн пригоден только одножильный, а размещать антенны в пространстве необходимо параллельно друг другу.) Пакет информации длиной в 24 байта (с учетом влажности и температуры) без каких-то проблем уверенно передавался со скоростью 1200 бит/с по диагонали через садовый участок 15 соток (около 40-50 метров), и затем через три бревенчатых стенки внутрь помещения (в котором, например, сотовый сигнал принимается с большим трудом и не везде). Условия, практически недостижимые для любого стандартного способа на 2,4 ГГц (типа Bluetooth, Zig-Bee и даже любительский Wi-Fi), притом, что потребление передатчика здесь составляет жалкие 8 мА и только в момент собственно передачи, остальное время передатчик потребляет сущие копейки. Передатчик конструктивно размещен внутри выносного блока, антенна торчит сбоку горизонтально.
Объединяем все данные в один пакет (в реальной станции к нему добавятся еще температура и влажность), состоящий из единообразных 4-байтных частей и предваряемый сигнатурой «DAT», отправляем его на передатчик и завершаем все циклы:
/*=====Transmitter=====*/
String strMsg="DAT"; //сигнатура - данные
strMsg+=volt; //присоединяем батарейку 4 разряда
strMsg+=wind_G; //присоединяем wind 4 разряда
strMsg+=fi; //присоединяем частоту 4 разряда
strMsg.toCharArray(msg,16); //переводим строку в массив
// Serial.println(msg); //для контроля
vw_send((uint8_t *)msg, strlen(msg)); // передача сообщения
vw_wait_tx(); // ждем завершения передачи - обязательно!
delay(50); //+ еще на всякий случай задержка
count=0; //обнуляем счетчик
}//end count==3
else count++;
digitalWrite(ledPin, LOW); //гасим сигнальный светодиод
system_sleep(); //систему — в сон
} //end loop
Размер пакета можно сократить, если отказаться от требования представления каждой из величин разнообразных типов в виде единообразного 4-байтового кода (например, для кода Грея, конечно, хватит и одного байта). Но универсализации ради я оставил все как есть.
Питание и особенности конструкции выносного блока. Потребление выносного блока подсчитываем таким образом:
— 20 мА (излучатель) + ~20 мА (контроллер со вспомогательными цепями) в течение примерно 0,25 с каждые четыре секунды — в среднем 40/16 = 2,5 мА;
— 130 мА (излучатели) + ~20 мА (контроллер со вспомогательными цепями) в течение примерно 2 мс каждые 16 секунд — в среднем 150/16/50 ≈ 0,2 мА;
Накинув на этот расчет потребление контроллера при съеме данных с датчика температуры-влажности и при работе передатчика, смело доводим среднее потребление до 4 мА (при пиковом около 150 мА, заметьте!). Батарейки (которых, кстати, потребуется аж 8 штук для обеспечения питания передатчика максимальным напряжением!) придется менять слишком часто, потому возникла идея питать выносной блок от 12-вольтовых аккумуляторов для шуруповерта — их у меня образовалось как раз две штуки лишних. Емкость их даже меньше, чем соответствующего количества АА-батареек — всего 1,3 А•часа, но зато никто не мешает их менять в любое время, держа наготове второй заряженный. При указанном потреблении 4 мА емкости 1300 мА•часов хватит примерно на две недели, что получается не слишком хлопотно.
Отметим, что напряжение свежезаряженного аккумулятора может составить до 14 вольт. На этот случай поставлен входной стабилизатор 12 вольт — чтобы не допустить перенапряжений питания передатчика и не перегружать основной пятивольтовый стабилизатор.
Выносной блок в подходящем пластиковом корпусе размещается под крышей, к нему на разъемах подведен кабель питания от аккумулятора и соединения с датчиками ветра. Основная сложность в том, что схема оказалась крайне чувствительной к влажности воздуха: в дождливую погоду уже через пару часов начинает сбоить передатчик, измерения частоты показывают полную кашу, а измерения напряжения аккумулятора показывают «погоду на Марсе».
Поэтому после отладки алгоритмов и проверки всех соединений корпус необходимо тщательно герметизировать. Все разъемы в месте входа в корпус промазываются герметиком, то же самое касается всех головок винтов, торчащих наружу, выхода антенны и кабеля питания. Стыки корпуса промазываются пластилином (с учетом того, что их придется разнимать), и дополнительно проклеиваются сверху полосками сантехнического скотча. Неплохо дополнительно аккуратно укрепить эпоксидкой используемые разъемы внутри: так, указанный на схеме выносного модуля DB-15 сам по себе не герметичен, и между металлическим обрамлением и пластиковой основой будет медленно просачиваться влажный воздух.
Но все эти меры сами по себе дадут только кратковременный эффект — даже если не будет подсоса холодного влажного воздуха, то сухой воздух из комнаты легко превращается во влажный при падении температуры снаружи корпуса (вспомните про явление, называемое «точка росы»). Чтобы этого избежать, необходимо внутри корпуса оставить патрончик или мешочек с влагопоглотителем — силикагелем (мешочки с ним иногда вкладывают в коробки с обувью или в некоторые упаковки с электронными устройствами). Если силикагель неизвестного происхождения и долго хранился, его перед использованием необходимо прокалить в электродуховке при 140-150 градусах несколько часов. Если корпус герметизирован как следует, то менять влагопоглотитель придется не чаще, чем в начале каждого дачного сезона.
Основной модуль
В основном модуле все величины принимаются, расшифровываются, если надо, преобразуются в соответствии с калибовочными уравнениями и выводятся на дисплеи.
Приемник вынесен за пределы корпуса основного модуля станции и помещен в маленькую коробочку с ушками для крепления. Антенна выведена через отверстие в крышке, все отверстия в корпусе загерметизированы сырой резиной. Контакты приемника выведены на очень надежный отечественный разъем типа РС-4, со стороны приемника он подключен через отрезок сдвоенного экранированного AV-кабеля:

По одной из жил кабеля снимается сигнал, по другой подается питание в виде «сырых» 9 вольт от адаптера питания модуля. Стабилизатор типа LM-2950-5.0 вместе с фильтрующими конденсаторами установлен в коробочке вместе с приемником на отдельной платке. Производились эксперименты по увеличению длины кабеля (на всякий случай — вдруг через стенку не заработало бы?), в которых выяснилось, что в пределах длины до 6 метров ничего не меняется.
Дисплеев типа OLED всего четыре: два желтых обслуживают метеоданные, два зеленых часы и календарь. Размещение их показано на фото:

Обратите внимание, что в каждой группе один из дисплеев — текстовый, второй — графический, с искусственно созданными шрифтами в виде картинок глифов. Здесь мы в дальнейшем на вопросе вывода информации на дисплеи останавливаться не будем, чтобы не раздувать и без того обширный текст статьи и примеров: из-за наличия картинок глифов, которые приходится выводить индивидуально (зачастую простым перечислением вариантов путем оператора case) программы вывода могут быть весьма громоздки. О том, как обращаться с таким дисплеями, см. публикацию автора «Графический и текстовый режим дисплеев Winstar», где есть в том числе и пример дисплея для вывода данных ветра.
Принципиальная схема. Часы и их дисплеи для удобства настройки обслуживаются отдельным контроллером Arduino Mini и больше мы их здесь разбирать не будем. Схема подключения компонентов к Arduino Nano, управляющим приемом и выводом метеоданных, следующая:

Здесь, в отличие от выносного модуля, показано подключение метеодатчиков — барометра и внутреннего датчика температуры-влажности. Следует обратить внимание на разводку питания — дисплеи питаются от отдельного стабилизатора 5 В типа LM1085. От него же естественно запитать дисплеи часов, однако в этом случае контроллер часов также должен питаться от этого же напряжения, причем через вывод 5 В, а не Vin (для Mini Pro последний называется RAW). Если запитать контроллер часов так же, как Nano — 9 вольтами через вывод RAW, то его внутренний стабилизатор будет конфликтовать с внешними 5-ю вольтами и в этой борьбе, естественно, победит сильнейший, то есть LM1085, а Mini останется вовсе без питания. Также во избежание всяческих неприятностей перед программированием Nano и особенно Mini (то есть перед подключением USB-кабеля) внешний адаптер следует отключать.
На стабилизаторе LM1085 при подключении всех четырех дисплеев будет выделяться мощность около ватта, потому его следует установить на маленький радиатор около 5-10 см2 из алюминиевого или медного уголка.
Прием и обработка данных. Здесь я воспроизвожу и комментирую только фрагменты программы, относящиеся к данным ветра, о других датчиках несколько слов далее.
Для приема сообщения по каналу 433 МГц применим стандартный способ, описанный во множестве источников. Подключаем библиотеку и объявляем переменные:
#include <VirtualWire.h>
. . . . .
int volt; //напряжение акуумулятора в условном целом коде
float batt; //реальная величина — напряжение аккумулятора
byte wDir; //направление в коде Грея
uint16_t t_time = 0; //интервал времени приема
char str[5]; //строка для данных
uint8_t buf[VW_MAX_MESSAGE_LEN]; //переменная для принятого сообщения
uint8_t buflen = VW_MAX_MESSAGE_LEN; // max длина принятого сообщения
. . . . .
С величиной размера буфера buflen связана одна особенность: объявить ее значение (VW_MAX_MESSAGE_LEN) один раз в начале программы недостаточно. Так как в функции приема (см. далее) эта переменная фигурирует по ссылке, то размер сообщения по умолчанию приходится обновлять каждый цикл. Иначе из-за приема испорченных сообщений значение buflen будет каждый раз укорачиваться, пока вы не начнете получать всякую чушь вместо данных. В примерах обе эти переменные обычно объявляют локально в цикле loop(), потому размер буфера обновляется автоматически, а здесь мы просто будем повторять присваивание нужного значения в начале каждого цикла.
В процедуре setup делаем следующие установки:
void setup() {
delay (500); //для устаканивания питания дисплеев
pinMode(16,INPUT_PULLUP); //вывод для кнопки
vw_setup(1200); // Скорость соединения VirtualWire
vw_set_rx_pin(17); //A3 Вывод приемника VirtualWire
. . . . .
Перед тем, как что-то принимать, проверяется интервал времени t_time, прошедшего с последнего приема. Если он превысил разумные пределы (например, 48 секунд — трехкратное время повтора сообщений с внешнего блока), то это воспринимается, как потеря датчика и каким-то образом индицируется на дисплее:
void loop() {
vw_rx_start(); // Готовность приема
buflen = VW_MAX_MESSAGE_LEN; //размер буфера каждый раз заново
if ((int(millis()) - t_time) > 48000) //если t_time не обновлялось более 48 сек
{
<отображаем прочерк на дисплее>
}//end датчик не найден
if (vw_have_message()) { //ждем приема
if (vw_get_message(buf, &buflen)) // Если данные приняты
{
vw_rx_stop(); //останавливаем прием на время
t_time = millis(); //обновляем t_time
for (byte i=0;i<3;i++) // Получить первые три байта
str[i]= buf[i];
str[3]='';
if((str[0]=='D')&&(str[1]=='A')&&(str[2]=='T')) { //сигнатура принята
//принимаем данные:
for (byte i=3;i<7;i++) // извлечь четыре байта аккумулятора
str[i-11]= buf[i]; // упаковать их в строку
volt=atoi(str); //преобразовать в целое число
volt=(volt/10)-100; //удаляем добавки до 4-х байт
batt=float(volt)/55.5; //преобразуем в реальный вид напряжения в вольтах
//и пока храним в глобальной переменной
for (byte i=7;i<11;i++) // извлечь четыре байта направления
str[i-15]= buf[i]; // упаковать их в строку
int w_Dir=atoi(str); //преобразовать в целое число
w_Dir=(w_Dir-1000)/10; //возвращаем к исходному виду
wDir=lowByte(w_Dir); //младший байт - код Грея
<выводим направление на дисплей через оператор case>
. . . . .
Коэффициент 55.5 — пересчет значения кода АЦП в реальное напряжение, его величина зависит от опорного напряжения и величин резисторов делителя.
Кстати, код Грея имеет одну особенность: в нем неважен порядок бит, все свои свойства код сохраняет при любой их перестановке. А так как при расшифровке мы здесь все равно рассматриваем каждый случай отдельно, то биты можно рассматривать в любом порядке и даже путать при подключении. Другое дело, если бы захотели это дело как-то упорядочить — например, создать массив значений направления («с», «ссз», «сз», «зсз», «з» и т.д.), и вместо индивидуального рассмотрения каждого варианта извлекать обозначения по номеру в этом массиве. Тогда пришлось бы преобразовывать код Грея в упорядоченный двоичный, и порядок бит играл бы существенную роль.
И, наконец, извлекаем значение скорости и закрываем все операторы:
. . . . .
for (byte i=19;i<23;i++) // Получить четыре байта частоты
str[i-19]= buf[i]; // упаковать их в строку
int wFrq=atoi(str); //преобразовать в целое число
wFrq = (wFrq-1000)/10; //удаляем добавки до 4-х байт
wFrq=10+0.5*wFrq;//скорость в целом виде с десятыми
<отображаем ее на дисплее поразрядно>
}//end if str=DAT
}//end vw_get_message
} //end vw_have_message();
. . . . .
Здесь 10+0.5*wFrq — калибровочное уравнение. 10 дм/с (то есть 1.0 метра в секунду) есть порог трогания, а 0,5 — коэффициент пересчета частоты в скорость (в дм/сек). При нулевом значении входной частоты это уравнение выдает 10 дм/с, потому следует отдельно позаботиться, чтобы при этом выводить не 1 м/с, а именно нулевое значение. Калибровать датчик скорости можно с помощью любого самого дешевого ручного анемометра и настольного вентилятора. Не пытайтесь определить порог трогания экспериментально — гораздо точнее получится, если отметить две-три точки калибровочной прямой значения скорости V от частоты F: V = Vп + K×F при разных скоростях потока, тогда порог трогания определится автоматически, как величина Vп (ордината точки пересечения этой прямой с осью скоростей).
Перед тем, как закрыть основной цикл, нужно сделать еще одну вещь. Напряжение аккумулятора у нас имеется, но выводить на дисплей все время его не нужно — только место занимать. Для этого и нужна кнопка Кн1 — нажимая на нее, мы временно (до следующего обновления данных) заменяем строку внешней температуры-влажности значением напряжения:
. . . . .
if (digitalRead(16)==LOW){ //кнопка нажата
<выводим напряжение на дисплей, затирая значение температуры-влажности>
}//конец кнопка
delay(500);
}//конец loop
Кнопка у меня была, как видно из схемы, с перекидным контактом, но ничто не мешает установить обычную с замыкающим, подключив ее к питанию через резистор. Можно также добавить к этому мигание символов на дисплее в случае, если напряжение аккумулятора снизится ниже, например, 10 вольт, как знак, что его пора менять.
В заключение о метеодатчиках. В качестве наружного датчика был использован SHT-75 — единственный из найденных мной любительских датчиков, который не требует калибровки и показывает реальные величины и температуры и влажности прямо «из коробки» (отсюда и его высокая цена). Библиотеку для его подключения можно найти тут.
Сконструирован SHT-75 довольно по-дурацки: металлическая подложка платы отлично проводит тепло, потому его необходимо целиком выносить за пределы корпуса. Иначе наличия одного только контроллера типа ATmega328 со стабилизатором питания в замкнутом корпусе достаточно, чтобы через подложку платы подогреть датчик на пару градусов даже в случае, если его головка вынесена наружу. Моя схема с датчиками ветра, с ее токами в 20-130 мА (пусть даже текущими ничтожные миллисекунды) подогревала SHT-75 градусов на пять, поэтому он был вынесен наружу и установлен отдельно на пластиковую пластину, торчащую из корпуса вбок.
Данные с SHT-75 снимаются тем же контроллером, что и данные датчиков ветра, и посылаются из выносного модуля в едином пакете через беспроводной канал 433 МГц. Для передачи предварительно они также приводятся к формату 4-байтовой строки.
Для измерения температуры и влажности внутри помещения был выбран банальный DHT-22 — поскольку диапазон там невелик в сравнении с улицей, то совершено безразлично, какой датчик использовать (кроме, разумеется, DHT-11, который вообще использовать не следует ни при каких обстоятельствах, в целевом назначении он просто неработоспособен). Температура DHT-22 была подправлена по измерениям ртутным термометром (с SHT-75 они полностью совпали!), а влажность слегка подрихтована сравнением с SHT-75. Поправки вводятся непосредственно перед индикацией на дисплее.
Кстати, DHT-22 тоже необходимо выносить подальше от корпуса с дисплеями — иначе он будет неизбежно подогреваться и врать. Я его закрепляю на пластиковом креплении внизу корпуса, на расстоянии миллиметров десять от него. Это обстоятельство, кстати, как я подозреваю, одна из причин (кроме отсутствия индивидуальной калибровки) того, что все фирменные бытовые метеостанции RST и Oregon безбожно врут в показаниях, имея разброс даже сами с собой (внутренний датчик с наружным) в два-три градуса и до десятка процентов влажности.
Барометр не представляет проблем, поскольку почти все имеющиеся в продаже сделаны на одной и той же основе — микроэлектромеханической (MEMS) микросхеме BMP180 или ее модификациях. Мой личный опыт попытки использования более редко встречающейся разновидности на основе LPS331AP был отрицательным: библиотеку для нее найти труднее, и в довершение был обнаружен конфликт с другими устройствами на I2C-шине. Показания барометра, возможно, придется подогнать по месту установки — каждые 10-12 метров высоты над уровнем моря снижают давление на 1 мм.рт. ст. Поэтому из показаний придется вычесть (или добавить) некую величину, чтобы величина давления соответствовала показаниям официальной метеостанции в данной местности.
Полностью все программы метеостанции я не привожу — они довольно громоздкие, а повторить конструкцию один в один вам все равно не удастся. Если что, стучитесь в личку.
Автор: YRevich






{kind=link}
{kind=link}